Tutorials
Kinematic array positioning
In SeaGap, the kinematic positioning function (kinematic_array) based on Kido et al. (2006) and Kido et al. (2008) is provided. A kinematic array position can be estimated for each shot group by Gauss-Newton method.
Input data
To perform kinematic_array, you have to prepare four input files denoted in Dataformat: "tr-ant.inp". "pxp-ini.inp", "ss_prof.inp", and "obsdata.inp". Outliers in "obsdata.inp" should be removed in advance; SeaGap includes a simple outlier removal function.
In "obsdata.inp", you have to write the shot group number.
$ head obsdata.inp
4 4.092871 500664407.000000 107.049217 74.549984 27.432900 -44.27880 -0.45120 0.53640 500664413.190022 110.954811 76.324655 28.280988 -44.93029 -2.03165 0.89020 1 1
4 4.090700 500664437.000000 124.727831 83.456801 27.671150 -49.09920 -0.61400 1.18480 500664443.187852 127.737889 85.946412 27.083811 -50.11868 -0.25212 -1.54370 2 1
1 3.932951 500664917.000000 328.921220 253.692382 28.154000 -52.76000 -1.08760 -4.84800 500664923.030102 332.591693 256.317961 27.675444 -52.68875 -0.89626 1.21533 3 1
3 4.357953 500664917.000000 328.921220 253.692382 28.154000 -52.76000 -1.08760 -4.84800 500664923.455105 332.632065 256.226557 28.147424 -52.71458 -1.45692 -0.33433 3 1
4 4.113388 500664917.000000 328.921220 253.692382 28.154000 -52.76000 -1.08760 -4.84800 500664923.210540 332.609684 256.278857 27.880494 -52.70038 -1.13751 0.54746 3 1
1 3.915718 500664977.000000 373.032034 269.762113 26.501800 -67.98040 0.74000 1.68840 500664983.012870 378.674213 271.833273 27.468078 -71.14971 -1.07657 -0.09575 4 1
3 4.385641 500664977.000000 373.032034 269.762113 26.501800 -67.98040 0.74000 1.68840 500664983.482792 379.052958 272.008269 27.946919 -71.32463 -1.99330 0.01337 4 1
4 4.107478 500664977.000000 373.032034 269.762113 26.501800 -67.98040 0.74000 1.68840 500664983.204630 378.825441 271.905307 27.676287 -71.21717 -1.48302 -0.05251 4 1
1 3.891855 500665037.000000 433.053071 301.791614 27.998850 -102.24360 -2.02200 -0.07680 500665042.989008 438.909005 305.956022 27.407876 -104.12427 -1.15657 0.14795 5 1
3 4.431185 500665037.000000 433.053071 301.791614 27.998850 -102.24360 -2.02200 -0.07680 500665043.528337 439.555522 306.315721 27.308195 -104.49262 -0.77367 -0.75093 5 1The last column shows the shot group number. kinematic_array() estimates a horizontal array position using the data with each shot number if number of the observational data lines are more than NR (NR=3 by default, but you cannot assign NR<2 because number of unknown paramters is 3). The detailed format of "obsdata.inp" are shown in Dataformat.
Estimation
You can simply perform kinematic_array as following:
lat=36.15753; TR_DEPTH=[4.0]
SeaGap.kinematic_array(lat,TR_DEPTH)The input files are fn1, fn2, fn3, and fn4; they correspond to "tr-ant.inp". "pxp-ini.inp", "ss_prof.inp", and "obsdata.inp" by default.
Then, after performing, you obtained a log file as fno0 (fno0="log.txt" by default), a position file fno1 (fno1="kinematic_array.out" by default), and a data misfit file fno2 (fno2="residual_kinematic.out").
"kinematic_array.out"
1: the transmitting time [sec]
2: number of the used observational data for each shot group
3: Easting displacement [m]
4: Northing displacement [m]
5: Vertical displacement [m]
6: NTD [sec]
7: Std. of Easting disp. [m]
8: Std. of Northing disp. [m]
9: Std. of Vertical disp. [m]
10: Std. of NTD [sec]
11: the shot group number
Note that 7-9 columns show "Inf" if number of the used observational data is 3.
$ head kinematic_array.out
5.00664917e8 3 0.15662931734126728 -0.08084253543354349 0.0 0.0019649922034895954 Inf Inf 0.0 Inf 3
5.00664977e8 3 0.13940031191470945 -0.044998764987785926 0.0 0.001975743839794656 Inf Inf 0.0 Inf 4
5.00665037e8 3 0.09543873587180635 -0.04340700740876836 0.0 0.0019599866103748153 Inf Inf 0.0 Inf 5
5.00665097e8 3 0.04579833896120086 0.006630443387361995 0.0 0.0019531607198649916 Inf Inf 0.0 Inf 6
5.00665157e8 4 0.06508724467893012 0.04206545454468572 0.0 0.0020172767856484557 0.00082667431544421 0.0008053431612205779 0.0 3.337355744065251e-7 7
5.00665217e8 4 0.06519260104146817 0.07061473998724858 0.0 0.0019966098658202587 0.03206491027644252 0.029742444781263446 0.0 1.322217043643957e-5 8
5.00665277e8 4 0.1133555414810341 0.09020348130701686 0.0 0.0019861055990347963 0.0677753402250701 0.06004930873573364 0.0 2.8314571352981234e-5 9
5.00665337e8 3 -0.02806919533739579 0.15267116520607066 0.0 0.0019312015121429856 Inf Inf 0.0 Inf 10
5.00665397e8 4 0.06272950313565163 0.08333257777799022 0.0 0.001982007884391134 0.050622346741337775 0.042713667410086316 0.0 2.1775176525718885e-5 11
5.00665457e8 4 0.12269481489808792 0.0679794473962017 0.0 0.001975411460083794 0.04764292338782072 0.03874236803802223 0.0 2.1044695812855657e-5 12"residual_kinematic.out"
1: the transmitted time
2: the transponder number
3: misfit [sec]
4: number of interations
5: the shot group number
6: number of the used data
If the number of the used data is 3, the misfits are almost zero.
$ head -n 16 residual_kinematic.out
5.00664917e8 1 -1.734723475976807e-18 3 3 3
5.00664917e8 3 4.336808689942018e-18 3 3 3
5.00664917e8 4 -3.903127820947816e-18 3 3 3
5.00664977e8 1 -8.673617379884035e-19 3 4 3
5.00664977e8 3 6.071532165918825e-18 3 4 3
5.00664977e8 4 -4.336808689942018e-18 3 4 3
5.00665037e8 1 4.0332320816460765e-17 3 5 3
5.00665037e8 3 -1.1839487723541708e-16 3 5 3
5.00665037e8 4 1.214306433183765e-17 3 5 3
5.00665097e8 1 -2.6020852139652106e-18 3 6 3
5.00665097e8 3 3.903127820947816e-18 3 6 3
5.00665097e8 4 2.6020852139652106e-18 3 6 3
5.00665157e8 1 1.9521010603167424e-7 3 7 4
5.00665157e8 2 -2.49146658609211e-7 3 7 4
5.00665157e8 3 2.9776429482687716e-7 3 7 4
5.00665157e8 4 -2.4382774225020776e-7 3 7 4You can change the following inversion criterion values by keyword arguments:
eps: Convergence criteria [m], the default is 1.e-4 (each inversion is converged when RMS of difference between the previous and the new solutions of the horizontal array displacements <eps)ITMAX: Maximum number of interations, the default is 20delta_pos: Infinitesimal amount of the array positions to calculate the Jacobian matrix, the default is 1.e-4 [m]
For example:
SeaGap.kinematic_array(lat,TR_DEPTH,delta_pos=1.e-5)If you'd like to calculate an average position during a campaign from the positioning results "kinematic_array.out", you can use position_kinematic(;fn,weight,fno). fn is the input file name (fn="kinematic_array.out" by default), and fno is the outpt file name fno="position_kinematic.out". If weight=true, weighted mean position is calculated using the shot groups with number of shot data for each group >= 4 (weight=false by default); thus, you cannot set weight=true for a GNSS-A site with only three transponders.
For example:
SeaGap.position_kinematic(fn="kinematic_array.out",weight=false)"position_kinematic.out"
1: the mean time [sec]
2: EW mean array displacement [m]
3: NS mean array displacement [m]
4: UD mean array displacement [m] Not available
5: Std of EW array displacement [m]
6: Std of NS array displacement [m]
7: Std of UD array displacement [m] Not available
$ cat position_kinematic.out
5.006910713024619e8 0.02405891197862978 -0.00999109884151074 NA 0.04738812642214625 0.0592217059058522 NAYou can estimate uplift component using kinematic_arra_3d(). In this case, you need to add option updown=true when using position_kinematic().
Visualization
If you'd like to plot the array positions in a horizontal map, you can use plot_map_array_kinematic(xrange,yrange; autoscale,fn,fno,show,col_num) function.
If
autoscale=true(default), the plot range is automatically determined. Ifautoscale=false, the plot range is fixed byxrangeandyrange.fnis the input file name: "array_kinematic.out" by default.If
show=false, the figure is saved asfno(fnois name of the output figure). Ifshow=truein REPL, a figure is temporally shown.If
col_num=1(default), the plot is colored by the observation time. Ifcol_num=2, the plot is colored by number of the used observational data. Ifcol_num=0, the plot is colored by blue.
SeaGap.plot_map_kinematic_array((-0.5,0.5),(-0.5,0.5),autoscale=false,fno="map_array_kinematic.png")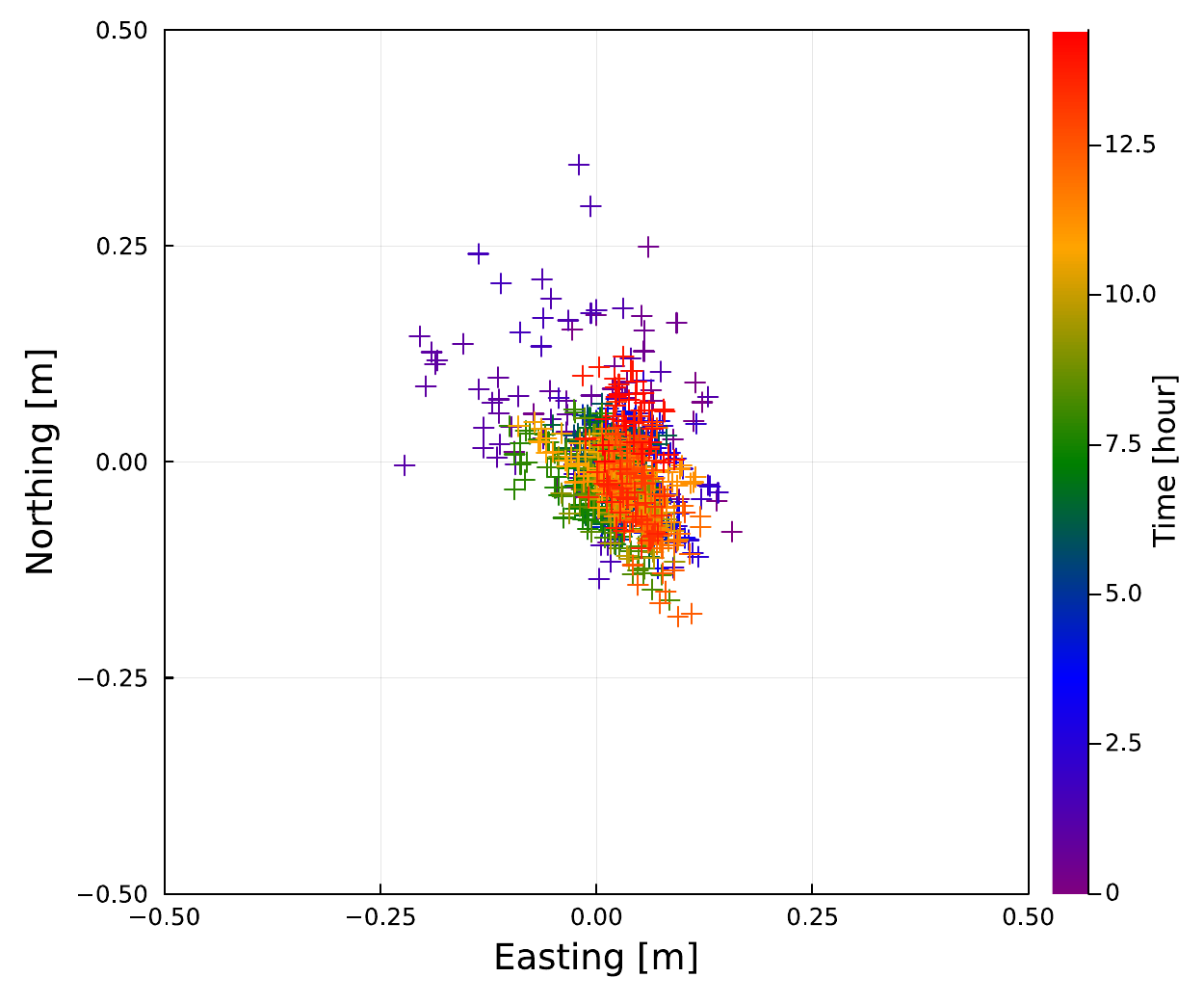
If you'd like to plot the array positions in time-series, you can use plot_time_kinematic_array(EW_range,NS_range.ntdrange.autoscale,fn,fno,show) function.
If
autoscale=true(default), the plot range is automatically determined. Ifautoscale=false, the plot range of y-componet is fixed byEW_range,NS_range, andntdrange. The range of x-compoent (Time) is automatically determined in the both cases.fnis the input file name: "kinematic_array.out" by default.If
show=false, the figure is saved asfno(fnois name of the output figure). Ifshow=truein REPL, a figure is temporally shown.
SeaGap.plot_time_kinematic_array(fno="time_kinematic_array.pdf")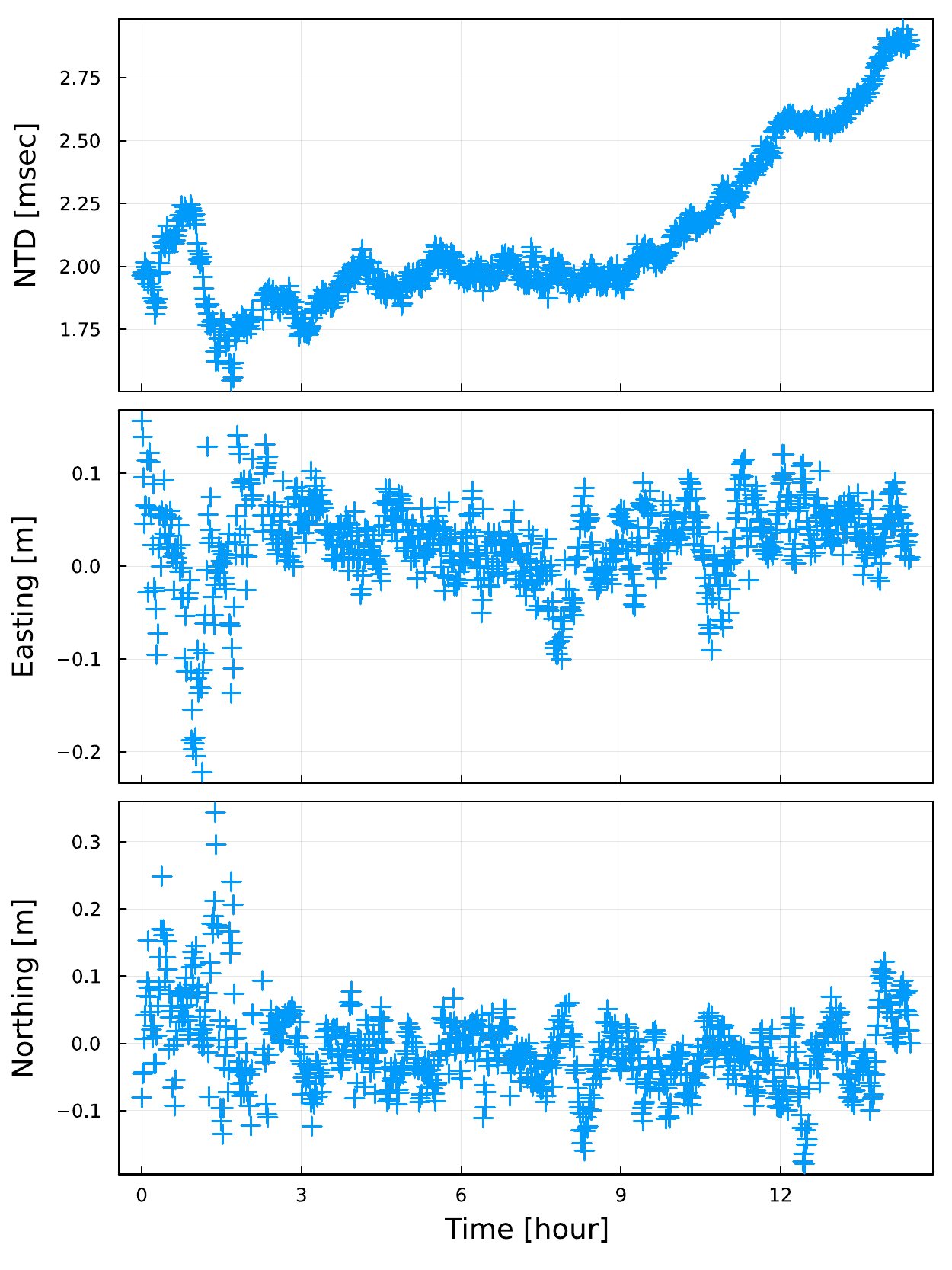
Outlier elimination
If you'ld like to eliminate outlier from the positioning results "kinematic_array.out", SeaGap provides denoise_kinematic(;method,n,sigma1,sigma2,type,save,prompt,fn,fn0,fno) as similar with denoise() in Outlier removal. denoise_kinematic() peform two types of filters; one is a spatial filter, and the other is a temporal filter.
In the spatial filter, we first calculate a mean/median position of the horizontal array positions, and then calculate standard deviation. The horiontal array positions beyond the range of sigma1*(Std) are eliminated as outliers.
In the temporal filter, we first perform a running mean/median filter to time-series of the horizontal array positions; then, calcualte standard deviation of the residuals after removing the filtered array positions. The residuals after removing the filtered array positions beyond the range of sigma2*(Std) are eliminated as outliers.
If you'd like to perform both filters, you set type="both". You can set type=spatial or type=temporal if you'd like to perform only one of the filters. method selects "mean" or "median".
Other arguments are used as following:
fn: Input file namefno1: Output figure name (fno1="denoise_kinematic.pdf"by default)fno2: Output file which lists the eliminated shot numbersn: Window size for the running filtersave: ifsave=true, the input data filefnis renamed and rewritten infn0(save=trueby default)prompt: ifprompt=true, confirmation message is shown; if false, the input file is forcely rewritten (prompt=trueby default)
You can adjust a figure shown by this function can be adjusted by the other additional arguments.
If you perform denoise_kinematic as following:
SeaGap.denoise_kinematic(n=7,sigma1=4.0,sigma2=5.0,method="median")the following figure is shown.
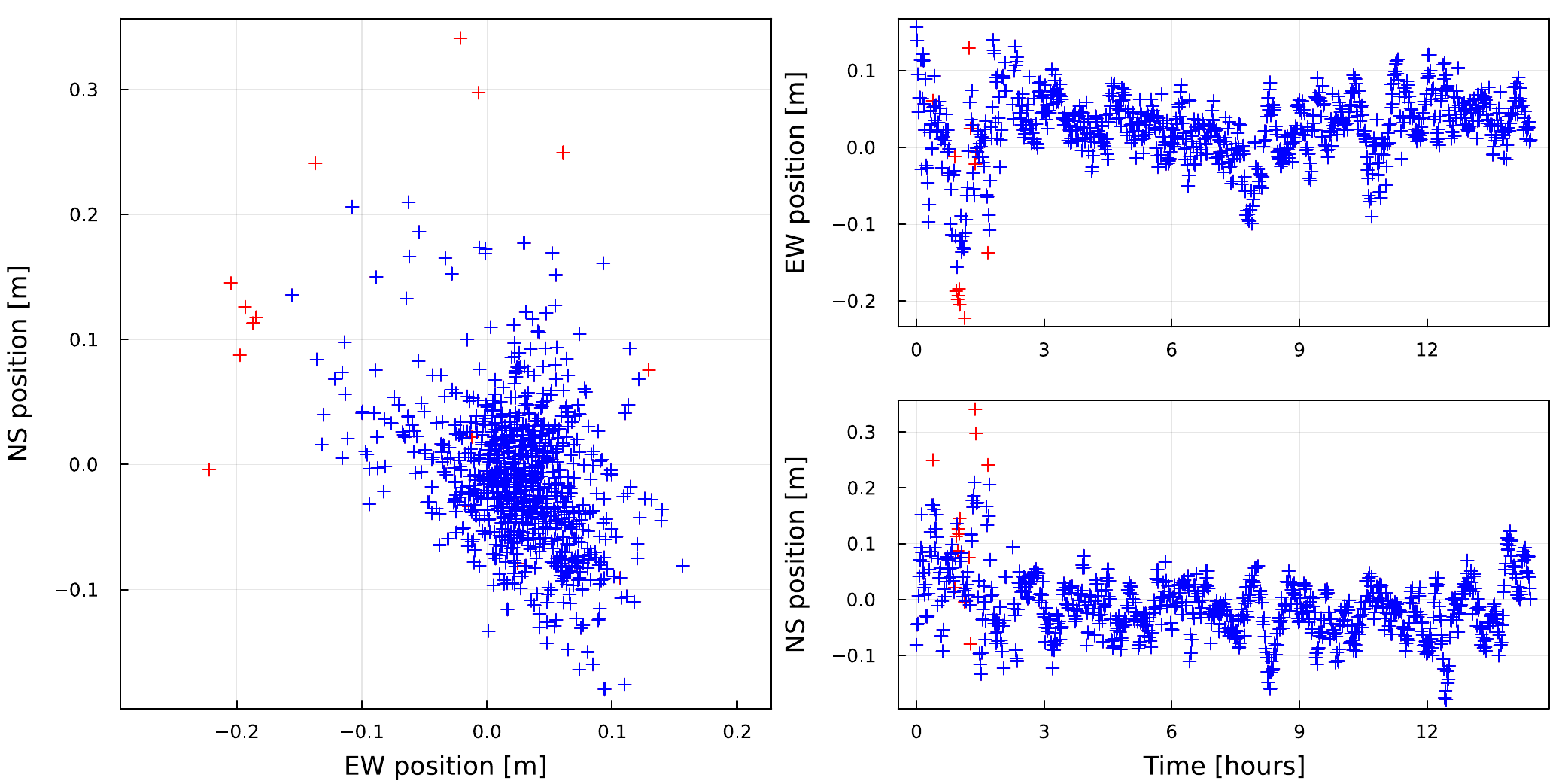
Then, the following message is shown if prompt=true:
Do you accept the denoise processin?If you accept the elimination, you enter "yes"; then, the outliers (red symbols) are eliminated from "kinematic_array.out" and the outlier list fno2 is saved:
$ cat eliminated_list.out
59
61
62
63
64
71
26
86
87
104
57
77
79These correspond to the 9th colmun of "kinematic_array.out".
If you enter "no", "kinematic_array.out" is not updated.
CC BY-SA 4.0 Fumiaki Tomita. Last modified: July 03, 2024.
Website built with Franklin.jl and the Julia programming language.